本教程前提:Astra Pro在ros2中部署成功(其他usb相机也可以),orb-slam3在ubuntu中部署成功
参考文章:
官方文档:https://github.com/zang09/ORB_SLAM3_ROS2/blob/humble/README.md
1.克隆仓库
将ORB_SLAM3_ROS2仓库克隆到你的 ROS 工作空间
mkdir -p slam_ws/src
cd ~/slam_ws/src
git clone https://github.com/zang09/ORB_SLAM3_ROS2.git orbslam3_ros22.修改源码
下载完成后修改orbslam3_ros2目录下的 CMakeLists.txt
- 将第 5 行中的路径修改为自己本机 ROS2 site-packages 的路径,一般来说都在/opt/ros/humble/lib/python3.10/site-packages
set(ENV{PYTHONPATH} "/opt/ros/humble/lib/python3.10/site-packages")- 修改slam_ws/src/orbslam3_ros2/CMakeModules/FindORB_SLAM3.cmake文件,这个是你的ORB_SLAM3所在的路径
set(ORB_SLAM3_ROOT_DIR "/home/cennum/ORB_SLAM3")3.安装依赖
1.ros依赖
sudo apt install ros-$ROS_DISTRO-vision-opencv && sudo apt install ros-$ROS_DISTRO-message-filters2.安装sophus
在你的ORB_SLAM3/Thirdparty/Sophus下编译安装Sophus
进入build目录可以直接安装,因为在编译ORB_SLAM3的时候一起编译了但是没有安装过
cd ~/{ORB_SLAM3_ROOT_DIR}/Thirdparty/Sophus/build
sudo make install3.注意要使用 OpenCV 4.5.4 版本进行编译(官方建议)
3.在工作空间下编译ORB_SLAM3_ROS2
cd ~/slam_ws
colcon build --symlink-install --packages-select orbslam3编译过程会遇到的问题:
如果编译时提示:
undefined reference to symbol 'cv::initUndistortRectifyMap(…)'
/usr/lib/x86_64-linux-gnu/libopencv_calib3d.so.4.5d: error adding symbols: DSO missing from command line这说明你用了 OpenCV 的函数,但链接器没有链接到 libopencv_calib3d.so。
解决方法:修改ORB_SLAM3_ROS2功能包下的 CMakeLists.txt 正确链接 OpenCV 库
修改有点复杂,这里直接给出完整的CMakeLists.txt ,可以直接替换之前的
cmake_minimum_required(VERSION 3.5)
project(orbslam3)
# You should set the PYTHONPATH to your own python site-packages path
set(ENV{PYTHONPATH} "/opt/ros/humble/lib/python3.10/site-packages/")
set(CMAKE_MODULE_PATH ${CMAKE_MODULE_PATH} ${CMAKE_CURRENT_SOURCE_DIR}/CMakeModules)
# Default to C++14
if(NOT CMAKE_CXX_STANDARD)
set(CMAKE_CXX_STANDARD 14)
endif()
if(CMAKE_COMPILER_IS_GNUCXX OR CMAKE_CXX_COMPILER_ID MATCHES "Clang")
add_compile_options(-Wall -Wextra -Wpedantic)
endif()
find_package(ament_cmake REQUIRED)
find_package(rclcpp REQUIRED)
find_package(sensor_msgs REQUIRED)
find_package(cv_bridge REQUIRED)
find_package(message_filters REQUIRED)
find_package(Sophus REQUIRED)
find_package(Pangolin REQUIRED)
find_package(ORB_SLAM3 REQUIRED)
# ✅ 新增:查找 OpenCV
find_package(OpenCV REQUIRED)
include_directories(
include
${ORB_SLAM3_ROOT_DIR}/include
${ORB_SLAM3_ROOT_DIR}/include/CameraModels
${OpenCV_INCLUDE_DIRS} # ✅ 添加 OpenCV 的头文件路径
)
link_directories(
include
)
add_executable(mono
src/monocular/mono.cpp
src/monocular/monocular-slam-node.cpp
)
ament_target_dependencies(mono rclcpp sensor_msgs cv_bridge ORB_SLAM3 Pangolin)
target_link_libraries(mono ${OpenCV_LIBS}) # ✅ 链接 OpenCV
add_executable(rgbd
src/rgbd/rgbd.cpp
src/rgbd/rgbd-slam-node.cpp
)
ament_target_dependencies(rgbd rclcpp sensor_msgs cv_bridge message_filters ORB_SLAM3 Pangolin)
target_link_libraries(rgbd ${OpenCV_LIBS}) # ✅ 链接 OpenCV
add_executable(stereo
src/stereo/stereo.cpp
src/stereo/stereo-slam-node.cpp
)
ament_target_dependencies(stereo rclcpp sensor_msgs cv_bridge message_filters ORB_SLAM3 Pangolin)
target_link_libraries(stereo ${OpenCV_LIBS}) # ✅ 链接 OpenCV
add_executable(stereo-inertial
src/stereo-inertial/stereo-inertial.cpp
src/stereo-inertial/stereo-inertial-node.cpp
)
ament_target_dependencies(stereo-inertial rclcpp sensor_msgs cv_bridge ORB_SLAM3 Pangolin)
target_link_libraries(stereo-inertial ${OpenCV_LIBS}) # ✅ 链接 OpenCV
install(TARGETS mono rgbd stereo stereo-inertial
DESTINATION lib/${PROJECT_NAME})
#install(DIRECTORY launch config vocabulary
# DESTINATION share/${PROJECT_NAME}/)
ament_package()
4.修改并运行ORB_SLAM3_ROS2的ros2节点
1.修改单目rgb启动节点
该文件位于/home/cennum/slam_ws/src/orbslam3_ros2/src/monocular/monocular-slam-node.cpp
/camera/color/image_raw修改为你自己的rgb相机的话题,啥相机都可以
MonocularSlamNode::MonocularSlamNode(ORB_SLAM3::System* pSLAM)
: Node("ORB_SLAM3_ROS2")
{
m_SLAM = pSLAM;
// std::cout << "slam changed" << std::endl;
m_image_subscriber = this->create_subscription<ImageMsg>(
"/camera/color/image_raw",//这里的/camera/color/image_raw修改为你自己的rgb相机的话题
10,
std::bind(&MonocularSlamNode::GrabImage, this, std::placeholders::_1));
std::cout << "slam changed" << std::endl;
}2.重新编译ORB_SLAM3_ROS2功能包
cd ~/slam_ws
colcon build --symlink-install --packages-select orbslam33.使用ros2 run启动orbslam3 mono(单目rgb)
需要传入俩个目录参数
第一个目录为相机的校准文件,直接使用ORB_SLAM3/Vocabulary/ORBvoc.txt(官方配置)
第二个目录为相机的配置文件,也是直接用官方的ORB_SLAM3/Examples/Monocular/TUM1.yaml
ros2 run orbslam3 mono /home/cennum/ORB_SLAM3/Vocabulary/ORBvoc.txt /home/cennum/ORB_SLAM3/Examples/Monocular/TUM1.yaml注意还有ORB_SLAM3的环境变量
echo 'export LD_LIBRARY_PATH=$LD_LIBRARY_PATH:/home/cennum/ORB_SLAM3/lib' >> ~/.bashrc
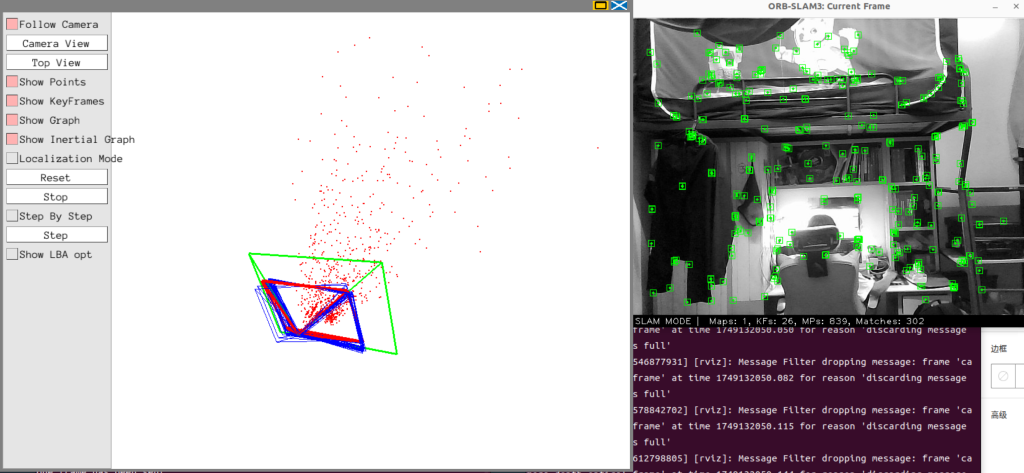
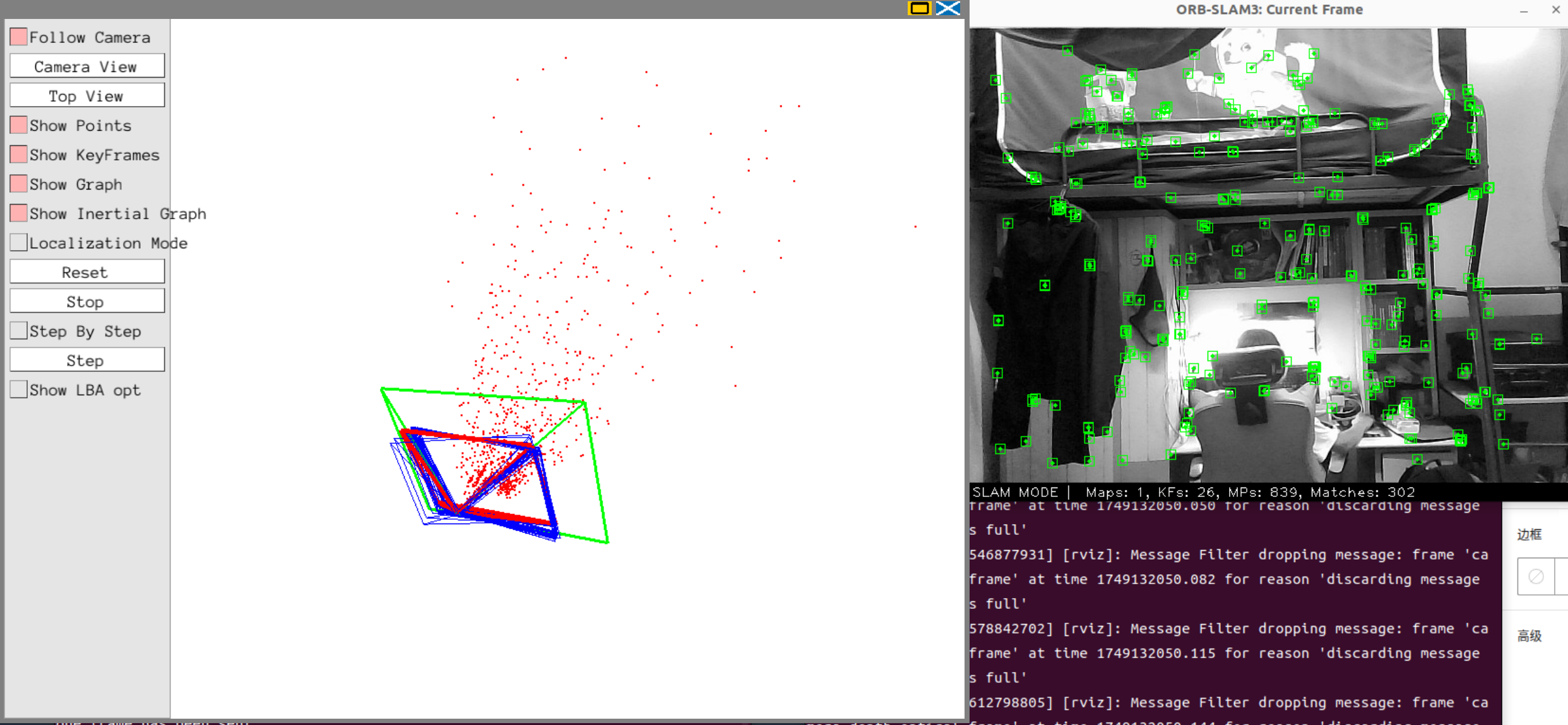
source ~/.bashrc4.启动效果