
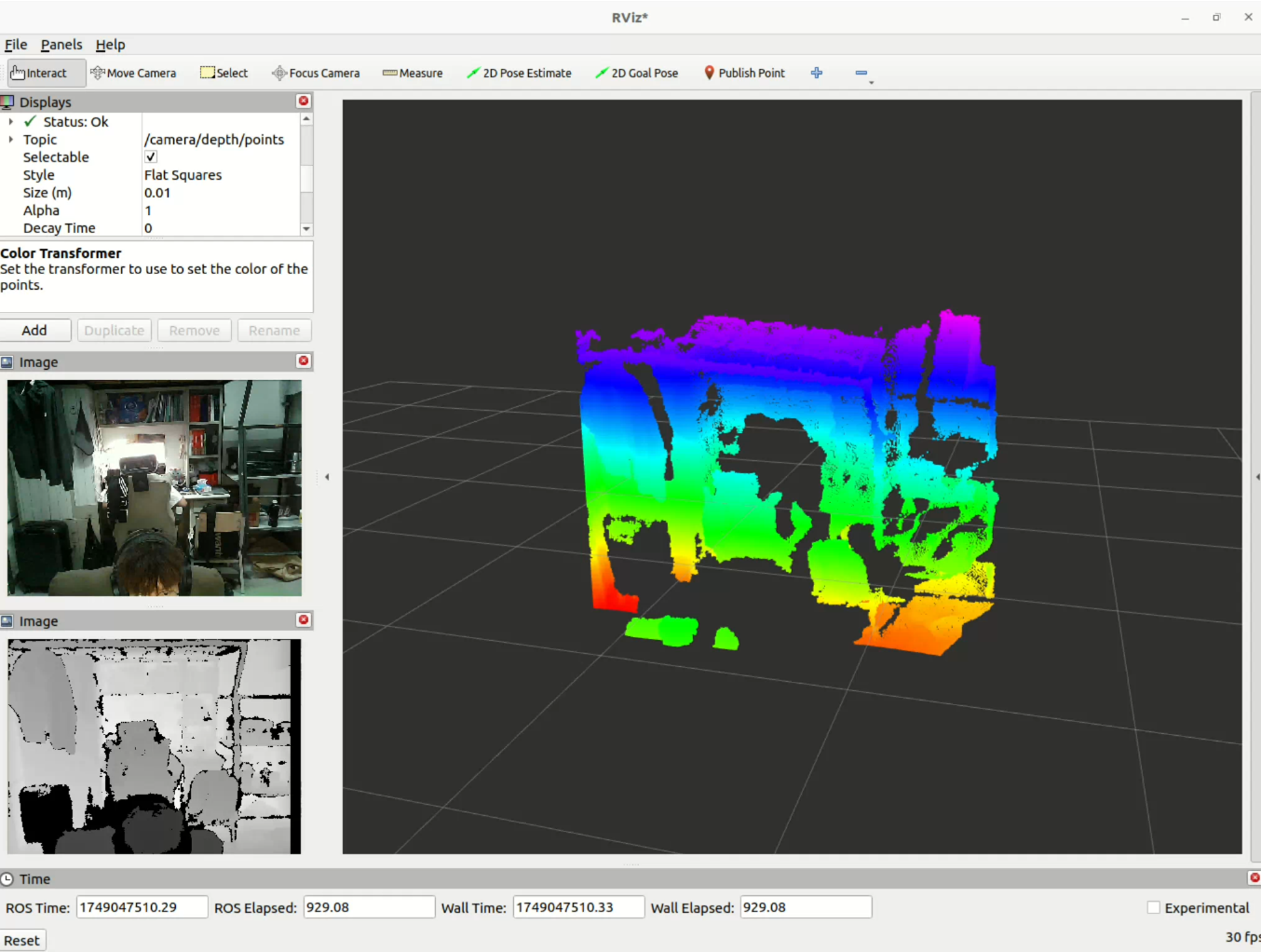
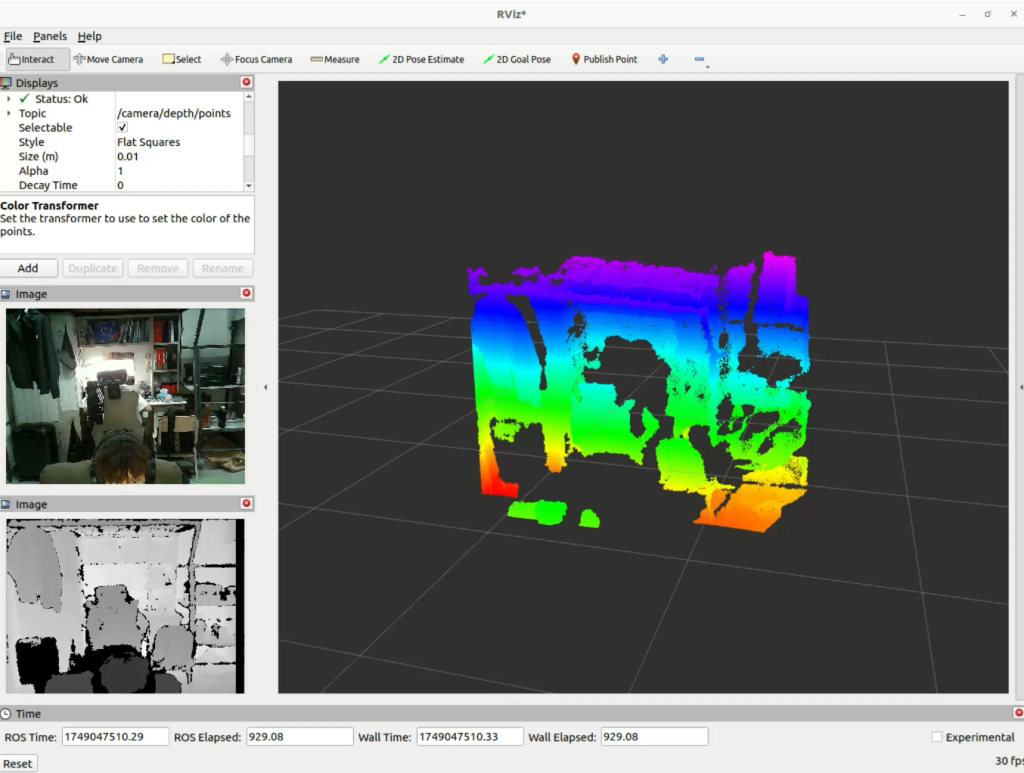
1.效果展示
rviz2效果展示
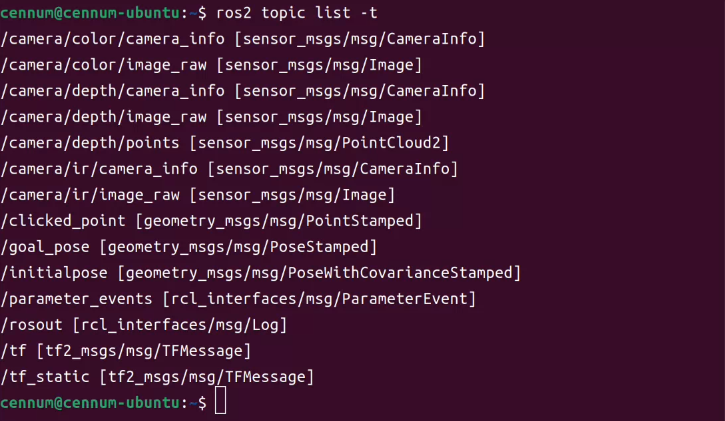
ros2 topic展示
2.配置方法
当你的Astra pro已经可以在你的ubuntu上运行OpenNI的例程之后,你可以很轻松的将Astra pro接入ros2
教程使用环境(ubuntu22.04+ROS2 humble)
2.1下载ROS2 SDK
官网现在无法下载,前往https://github.com/orbbec/ros2_astra_camera.git下载
下载后会得道俩个摄像头的ros2功能包
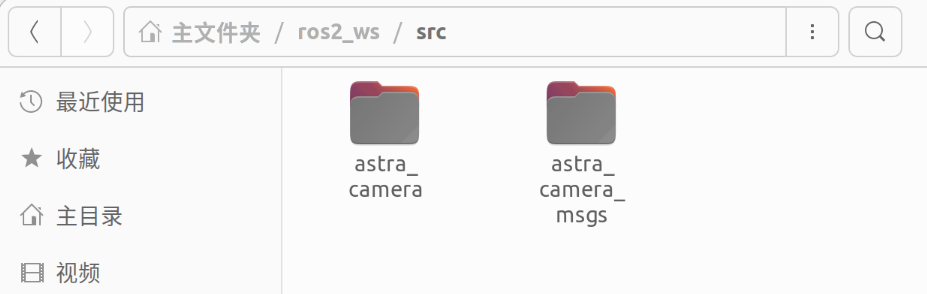
如上图所示,在家目录~下创建ros2_ws工作空间,在工作空间创建src文件夹,将这俩个功能包放进去
2.2 安装依赖
在https://github.com/orbbec/ros2_astra_camera/blob/master/README.MD的readme.txt里面有详细的依赖安装教程,这里只简单说一下
在ROS2 humble环境下,还要安装这些ros包
sudo apt install libgflags-dev ros-$ROS_DISTRO-image-geometry ros-$ROS_DISTRO-camera-info-manager\
ros-$ROS_DISTRO-image-transport ros-$ROS_DISTRO-image-publisher libgoogle-glog-dev libusb-1.0-0-dev libeigen3-dev有些可能安装不上,可以在上面的命令末尾加–fix-missing
然后是安装libuvc,直接跟着官方教程来
2.3 编译工作空间
编译前先前往人ros2_ws/src/astra_camera/scripts安装规则
cd ros2_ws/src/astra_camera/scripts
sudo bash install.sh
sudo udevadm control --reload-rules && sudo udevadm trigger规则安装完成,现在进入工作空间下编译
cd ~/ros2_ws
colcon build --event-handlers console_direct+ --cmake-args -DCMAKE_BUILD_TYPE=Release编译这里大部分报错是因为还有依赖没有安装成功(这类问题貌似可以i通过rosdep来解决),或者版本不匹配,
2.3.1 降级 setuptools
ROS 2 Humble 建议使用兼容的旧版本 setuptools(例如 65.x)。
pip install setuptools==65.5.1为了确保你使用的是正确的 Python 环境(ROS 使用的 Python),建议执行以下操作:
# 使用系统Python重新安装兼容版本
python3 -m pip install --user setuptools==65.5.1清理并重新编译
cd ~/ros2_ws
rm -rf build/ install/ log/
colcon build --event-handlers console_direct+ --cmake-args -DCMAKE_BUILD_TYPE=Release2.3.2 ros-humble-image-publisher安装不上导致编译报错
sudo apt install ros-humble-image-publisher 安装不上,我出现了这个问题,解决的方法是使用官方APT源来安装
2.3.3 缺少 nlohmann_json 开发包
安装就完了
sudo apt install nlohmann-json3-dev编译成功进入下一步
2.4 启动相机节点
source install/setup.bash
ros2 launch astra_camera astra_pro.launch.xml这个是专门启动astra pro的launch
启动后不报错误即成功,现在你可以使用ros2 topic list 来查看话题,
2.5 rviz2可视化
使用rviz2命令打开rviz,点击add,按话题添加,你会看到相机发布的话题。